レゴマインドストームRISの復活 (光センサを使いライントレース)
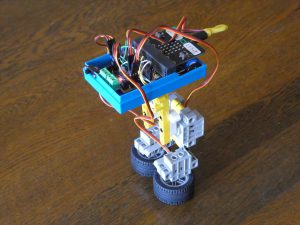
古いレゴマインドストーム Robotics Invention System (RIS) 2.0を改造し、光センサーを使ったライントレーサーを作ってみました。下は、RIS付属のテストパッドと、今回作ったライントレーサーです。
RISの復活の試みについては、このブログの「レゴマインドストームRISの復活 (電子部品の交換・改修)」という記事に書きました。その駆動部であるドライブベースについては、「レゴマインドストームRISの復活 (ドライブベースを作り動作確認)」という記事に書きました。今回は、光センサーを使ったライントレーサーの概要です。
ドライブベースに光センサーを組み込む
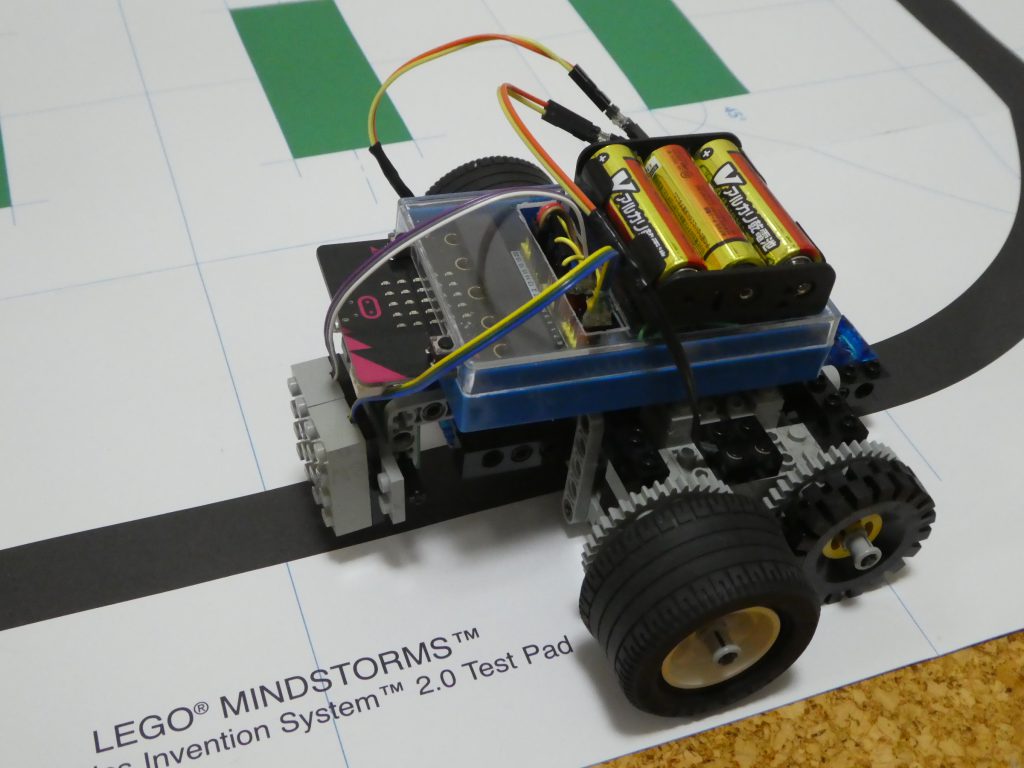
RISの光センサーは使えそうもなかったので、作り替えた光センサーを使いました。プログラムを簡単にするために、光センサーを2個使っています。
下は、ドライブベースに光センサーを2つ組み込んだ写真です。
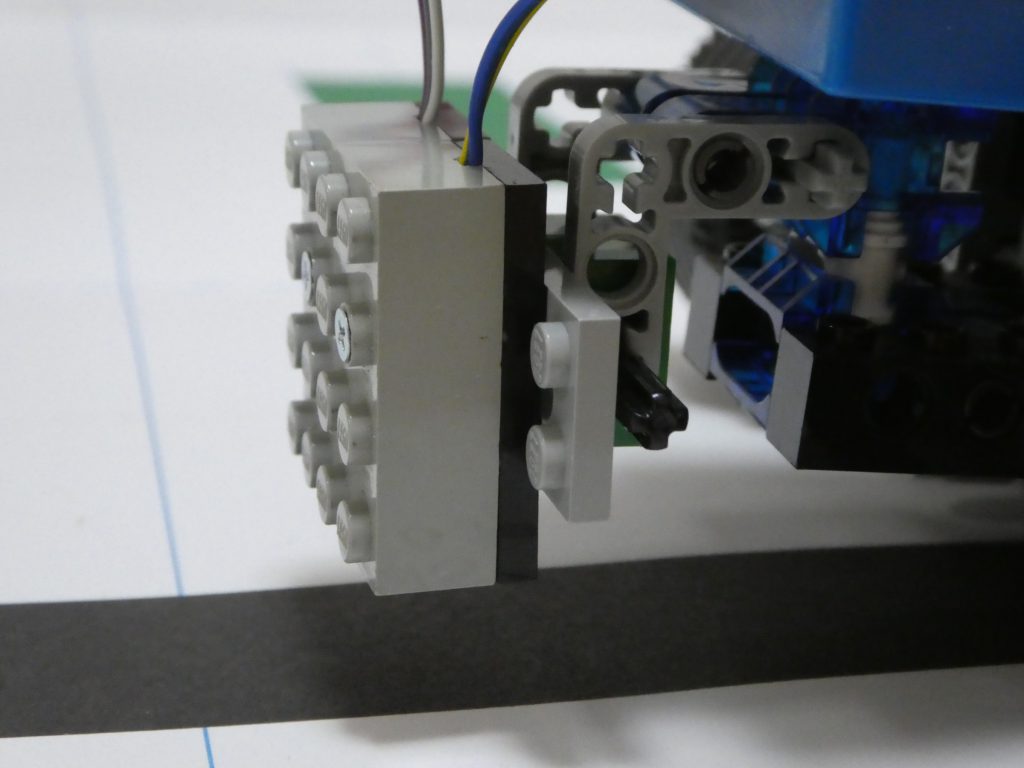
一体化モジュールは、センサーからの信号を入力し、ラインからのズレを判断し、もとに戻すように2輪を駆動し、ライン上を走るようにコントロールします。下に動画で紹介します。
ライントレースプログラム
下は、MakeCodeで組んだプログラムです。

ボタンAでトレーススタートです。
2つの光センサーを使っています。左右の光センサーの値を反射光量を比較する方法もありますが、ここでは、光量(電圧)にしきい値を掛け、ロジックでモーターを制御しています。
端子については、2つのモーターは、14、15、2、8を用い、2つの光センサーは、0、1を使っています。